来自北卡罗莱纳州立大学和北卡罗莱纳大学教堂山分校的最新案例研究表明,通过训练,对动力假肢脚踝的神经控制可以恢复多种功能,包括站立在非常具有挑战性的表面上并蹲下。研究人员目前正在与一大批研究参与者合作,以期研究结果可能有多广泛的适用性。
“本案例研究表明,可以使用这些神经控制技术,使设备响应患者肌肉的电信号,以帮助使用机器人修复的踝关节的患者更自然,更直观地运动,”该技术的相应作者Helen Huang说。学习。Huang是NC State和UNC的生物医学工程联合系的Jackson家族杰出教授。
该研究的第一作者兼博士学位的亚伦·弗莱明(Aaron Fleming)说:“这项工作表明,这些技术可以使患者有能力做我们以前认为不可能做的事情。”联合生物医学工程系的候选人。
现有的大多数关于机器人假肢脚踝的研究都只集中在使用自主控制的步行上。在这种情况下,自主控制意味着戴假肢的人决定是走路还是站着不动,而这些动作所涉及的精细动作是自动发生的,而不是因为佩戴者正在做的任何事情。
Huang,Fleming及其合作者想知道,如果截肢者与物理治疗师合作,接受神经控制的动力假肢踝关节训练,以应对典型假肢所面临的挑战。除了步行以外,截肢者是否有可能在人们日常脚踝动作中重新获得更多的控制权?
本研究中的动力假体从两条残余小腿肌肉读取电信号。那些小腿肌肉负责控制脚踝的运动。假体技术使用研究人员开发的控制范例,将来自那些肌肉的电信号转换为控制假体运动的命令。
研究人员与一名研究参与者合作,该参与者在膝盖和脚踝之间的一半位置失去了一条腿。参与者安装了动力假肢脚踝并进行了初步评估。然后,该患者与理疗师进行了五次培训,每次培训持续两个半星期,每次培训持续约两个小时。培训结束后,参与者进行第二次评估。
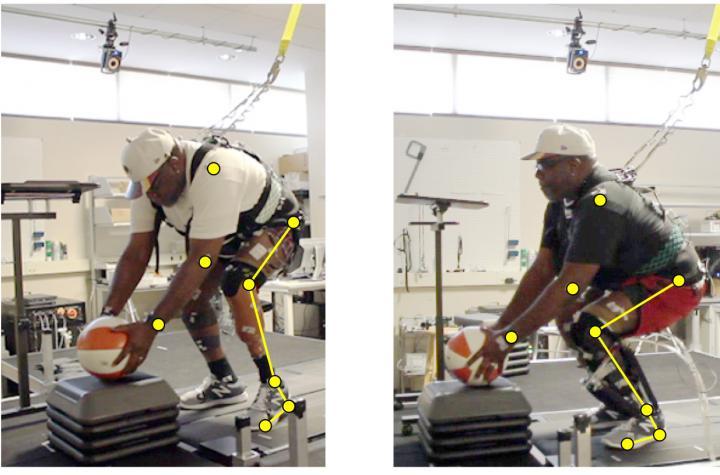
训练后,研究参与者能够完成以前很难完成的各种任务,例如从坐着到没有任何外部帮助的站立,或者蹲下来捡起地面上的东西而没有补偿身体其他部位的运动。但最明显的差异之一是研究参与者的站立或移动的稳定性。这既体现在经验评估上,例如站在泡沫上测试患者的稳定性时,也体现在患者对其自身稳定性的信心水平上。